Beschreibung der Elektrik
Die wesentlichen Teile der elektrischen Ausstattung sind
1. Anschlusskasten,
 Die
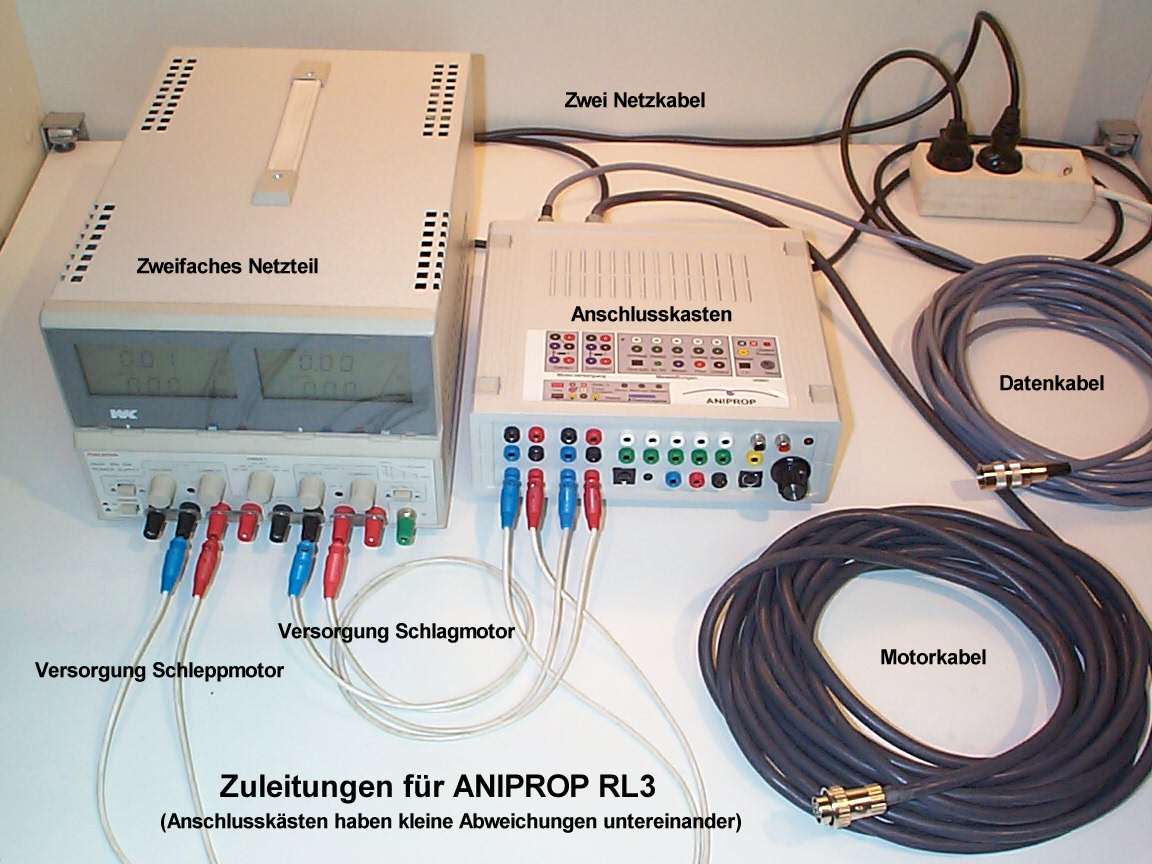
Abbildung zeigt den notwendigen Aufbau für die Versorgung des Anschlusskastens,
damit der Rundlauf betrieben werden kann. Nicht dargestellt in der Abbildung
ist das mitgelieferte Videokabel mit zwei abgeschirmten Leitungen, die
eine Verbindung zur Kamerahalterung auf der Zentraleinheit herstellen.
Der abgebildete Anschlusskasten unterscheidet sich geringfügig von
der Anordnung der Buchsen gegenüber dem gelieferten Anschlusskasten.
Die
Abbildung zeigt den notwendigen Aufbau für die Versorgung des Anschlusskastens,
damit der Rundlauf betrieben werden kann. Nicht dargestellt in der Abbildung
ist das mitgelieferte Videokabel mit zwei abgeschirmten Leitungen, die
eine Verbindung zur Kamerahalterung auf der Zentraleinheit herstellen.
Der abgebildete Anschlusskasten unterscheidet sich geringfügig von
der Anordnung der Buchsen gegenüber dem gelieferten Anschlusskasten.
1. Anschlusskasten
Der Anschlusskasten benötigt einen Netzanschluss für 220 V~, damit die Sensoren und der Servomotor für die Bewegung der Kamerahalterung betrieben werden können. Der mechanische Teil des Rundlaufs kann auch ohne Netzanschluss des Anschlusskastens betrieben werden. Die beiden linken Buchsenbereiche Ziehen und Schlagen sind für die Versorgung des Schleppmotors, der den Ausleger auf der Kreisbahn bewegt, und den Schlagmotor des künstlichen Vogels gedacht.
Hinweis: Elektrisch ist der Anschluss für den Schlagmotor über zwei Schleifringe in den Ausleger geführt. Der Eingang Schlagen kann deshalb auch für den elektrischen Antrieb eines Modellflugzeugs genutzt werden. Umgekehrt kann am Ausleger z.B. das Modell einer Windkraftanlage angebracht werden, deren Leistung über den Anschluss Schlagen aus dem Ausleger zurückgeführt wird.
|
Leiste 1 Leiste 2 Leiste 3
Leiste 4
|
 |
| Anschlüsse am Anschlusskasten |
Die Polarität für die Buchsen
Ziehen
und Schlagen ist Minus an der blauen Buchse und Plus an
der roten Buchse. Die jeweiligen roten Buchsen sind intern untereinander
verbunden. Der normale Eingang ist über die Buchsen auf Leiste 3.
Dann wird der Strom über einen Messwiderstand geleitet. An den Leisten
1 und 2 können zusätzliche Messgeräte angeschlossen werden.
Die am Messwiderstand abfallende Spannung kann an zwischen der blauen und
der schwarzen Buchse auf Leiste 2 gemessen werden und wird intern an einen
Anschluss der Datenerfassung weiter geleitet.
| Anschluss *) | Rmess [Ohm] | Rltg [Ohm] | Rges [Ohm] |
| Ziehen | 0.22 | 0.45 | 0.68 |
| Schlagen | 0.22 | 0.56 | 0.78 |
*) Diese Werte geben nur die Größenordnung an. Sie müssen für quantitative Versuche genau vermessen werden.
Um die Spannung am jeweiligen Motor ermitteln
zu können (z. B. für Antriebsleistungen), muss auch der Leitungswiderstand
bekannt sein. Die voran stehende Tabelle gibt dazu diesen Leitungswiderstand
an (Index "ltg"). Die Leitungswiderstände sind bestimmt worden, indem
die jeweiligen Motoranschlüsse überbrückt wurden.
Im Buchsenbereich Messleitungen
enden die fünf Sensoren für die Schleppkraft, den Fliehkraftwinkel,
Schlag- und Drehwinkel und die Umlaufposition. Auf den weißen Buchsen
enden die Signale, die grünen Buchsen sind die gemeinsame Minus-Leitung.
An Minus der blauen Buchse und Plus der roten Buchse
kan die 5V= Versorgung abgegriffen und überprüft werden. Die
grüne Kontrolle zeigt die Spannung an und muss leuchten bei eingeschaltetem
Netzteil. Anderenfalls liegt ein Kurzschluss in den Leitungen vor. Die
MiniDIN Buchse Test S/D passt zum Sensorstecker des künstlichen
Vogels bzw. des Flattergelenks und kann verwendet werden, diese Anschlüsse
ohne Umweg über die Schleifringe zu testen.
Der Drehknopf im Buchsenbereich Video
verändert die horizontale Position des Kamerahalters in einem Bereich
von etwa 45 Grad, um die optimale Sicht auf das Modell zu erzielen
(da der Ausleger je nach Schleppkraft seine Position zur Kamerahalterung
verändert). Die beiden abgeschirmten Signalleitungen vom Kamerakopf
sind nur zur Front des Anschlusskastens durchgelegt. Bei Bedarf können
die Signale auch für ein Y/C Videosignal (S-VHS bzw. High8) verwendet
werden. Eine entsprechende Buchse ist bereits vorhanden. Die Beschaltung
muss am Kamerakopf entsprechend vorgesehen werden.
Sicherheitshinweis: Leuchtet die grüne Kontrolle am Anschlusskasten bei eingeschalteter Netzversorgung nicht auf, muss der Anschlusskasten umgehend vom Netz genommen werden, da anderenfalls das eingebaute Netzteil für die 5V= Versorgung beschädigt wird.
Auf der Rückseite des Anschlusskastens
wird das Netzkabel eingesteckt und die 220V~ Versorgung eingeschaltet.
Dort befinden sich auch die Buchsen für das Motor- und das Datenkabel.
Ebenfalls kann dort das Videokabel eingesteckt werden, das nur zur Front
durchgeführt wird. Die 50-polige Steckerleiste führt die Messleitungen
weiter zur Datenerfassung an einem Computer. Geschaltet ist der Anschluss
für die Datenerfassungskarte PCI-6023E bzw. die DAQ-Card 700 (PCMCIA
Einschub für Laptops) von National Instruments.
Die gelben Buchsen führen auf den Schutzleiter des 220V~ Anschlusses
und an die gemeinsame Masseleitung für den Datenanschluss.
2. Anschlusskabel zur Zentraleinheit
Zur Zentraleinheit führen drei Kabel:
- Motorkabel
- Datenkabel
- Videokabel
 Die
8 m langen Anschlusskabel zur Zentraleinheit sind verwechslungssicher ausgelegt.
Die Anschlussdosen befinden sich auf Leiste 4 an der Rückseite des
Anschlusskastens. Die Renkverschlüsse sollten stets eingedreht sein,
um einen sicheren Anschluss zu haben. Die Zuleitungen des Motorkabels haben
einen Querschnitt von 0.75 mm² und sind 8 m lang (Leitungswiderstand
von Kupfer ist 0.017 Ohm mm²/m). Der gesamte Leitungswiderstand
ist in der voranstehenden Tabelle angegeben. Der Übergangswiderstand
zum Schlagmotor an den Schleifringen kann im Laufe der Zeit Schwankungen
unterliegen und sollte für genaue quantitative Messungen jeweils neu
bestimmt werden.
Die
8 m langen Anschlusskabel zur Zentraleinheit sind verwechslungssicher ausgelegt.
Die Anschlussdosen befinden sich auf Leiste 4 an der Rückseite des
Anschlusskastens. Die Renkverschlüsse sollten stets eingedreht sein,
um einen sicheren Anschluss zu haben. Die Zuleitungen des Motorkabels haben
einen Querschnitt von 0.75 mm² und sind 8 m lang (Leitungswiderstand
von Kupfer ist 0.017 Ohm mm²/m). Der gesamte Leitungswiderstand
ist in der voranstehenden Tabelle angegeben. Der Übergangswiderstand
zum Schlagmotor an den Schleifringen kann im Laufe der Zeit Schwankungen
unterliegen und sollte für genaue quantitative Messungen jeweils neu
bestimmt werden.
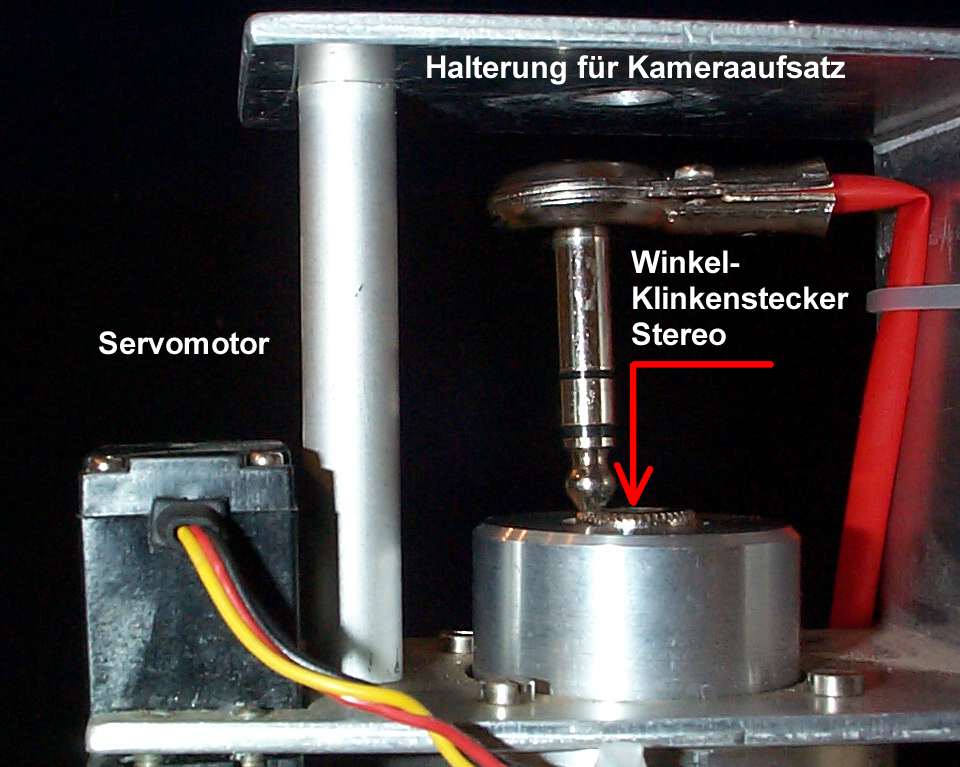
Das Videokabel verbindet die Anschlussbuchse im Kopf der Zentraleinheit mit den beiden Cinch-Buchsen rechts auf der Fronseite des Anschlusskastens. Das Videokabel wird auf der Rückseite farbrichtig auf Leiste 4 eingesteckt. Die Anschlüsse sind nur durchgelegt und erscheinen im Feld Video. Der zugehörige Mini-Din Anschluss kann dazu verwendet werden, von der Kamera ein S-VHS- bzw. High8-Signal zu überrtragen. Das Bild zeigt den Anschluss des mitgelieferten Winkelsteckers (Audio-Klinkenstecker 6.3 mm, Stereo) an die Schleifringe am oberen Ende der Zentraleinheit.
Sicherheitshinweis:Sichern Sie die Kabel auf beiden Seiten (Stativ und Arbeitstisch) an denen Füßen mit einer Zugentlastung (Klettband o.ä.).
3. Antriebsmotoren
Es gibt drei Motoren, die angetrieben werden müssen:
- Schleppmotor für den Ausleger
- Schlagmotor für den künstlichen Vogel
- Servomotor für die Kameraposition
Hinweis zu Labornetzteilen:
Das Labornetzteil PDD3010A (Doppelnetzteil mit 30 V und 10 A, maximal 60 W pro Ausgang) von Wayne & Kerr Ltd. ist nicht mehr im Handel. Aus diesem Grund sind von uns für den Schlagantrieb ab 2004 andere Motoren verwendet, die bei höherer Betriebsspannung und niedrigerem Strombedarf arbeiten.
Wir empfehlen ab 2004 das Netzteil EL 302D
von Thurlby Thandar Instruments
( TTi ). Das Gerät ist ebenfalls ein Doppelnetzteil
mit jeweils 30 V und 2 A, maximal 60 W pro Ausgang. Bezugsquelle in Deutschland
ist u.a. RS Components.
Hinweis für alle Kunden: Soll für einen Rundlauf, der vor 2004 gebaut worden ist, ein neues Netzteil beschafft werden, ist das Gerät CPX 200 von TTi geeignet, das über zwei Kanäle mit 35 V und 10 A (maximal 175 W für beide Kanäle) verfügt. Gegebenenfalls kann auch der Motor des künstlichen Vogels ausgetauscht werden: Igarashi-Motor mit 5-teiligem Anker, Typ N2738-51 3-18V, Nennspannung 12 V, 1,6A; 11,8W Abgabe; 12.300 U/min (Bezugsquelle: Conrad Elektronik Artikelnr. 24 45 20-93).
4. Sensoren
Es gibt insgesamt fünf Sensoren am Rundlauf für:
- Messung der Schleppkraft
- Messung des Fliehkraftwinkels
- Messung von Schlag- und Drehwinkel
- Messung der Umlaufposition
Schlag- und Drehwinkel beim künstlichen Vogel und beim Flattergelenk werden durch Feldplattenpotentiometer ermitttelt, die besonders leicht sind. Der Widerstand beträgt ca. 15 kOhm. Einzelheiten der Genauigkeit ergeben sich aus dem zugehörigen Datenblatt.
Die Umlaufposition wird durch eine Gabellichtschranke ermittelt, unter der eine Strichscheibe mit 180 Strichen auf dem Umfang durchläuft. Weitere Einzelheiten zu den Sensoren finden sich im Kapitel Sensoren.
5. Servomotor zur Kamerasteuerung
Der Servomotor wird durch den kleinen Stellknopf
rechts an der Frontseite des Anschlusskastens bewegt und schwenkt etwa
45 Grad aus. Damit können die Modelle besser beobachtet werden, wenn
der Kraftmesser sich strafft und die Modellposition sich dadurch gegenüber
der Kameraposition verschiebt.
Letzte Änderung: 16.05.2004