Beschreibung der Sensoren
Der Rundlauf hat fünf Sensoren:
1. Sensor für die Schleppkraft,
| Sensor | Typ | Kenndaten | Bezeichnung |
| Schleppkraft | Präzisionswinkelpotentiometer | 5 kOhm - Drehpotentiometer | Winkel |
| Fliehkraftwinkel | Präzisionswinkelpotentiometer | 5 kOhm - Drehpotentiometer | Winkel |
| Drehwinkel | Feldplattenpotentiometer | 15 kOhm - Inklinometer | Winkel |
| Schlagwinkel | Feldplattenpotentiometer | 15 kOhm - Inklinometer | Winkel |
| Umlaufposition | Gabellichtschranke | 180 Striche/Umfang | Winkel |
1. Sensor für die
Schleppkraft
 |
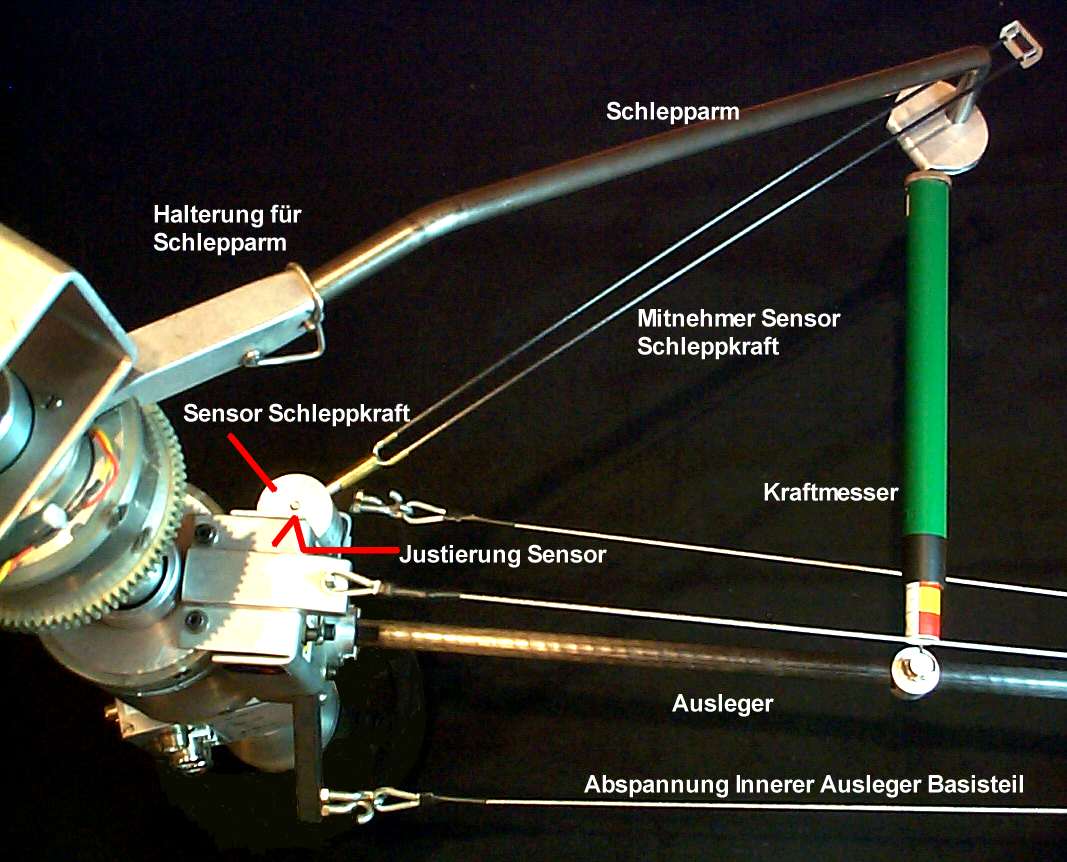 |
| Sensor Schleppkraft | Aufsicht auf die Messanordnung |
Die Auslenkung des Schleppkraftsensors ist
konstruktionsbedingt nicht groß: Zwischen minimaler und maximaler
Auslenkung ist ein Spannungsunterschied von ungefähr 0.5 V. Die Position
des Winkelpotentiometers kann so justiert werden, dass bei minimalem Ausschlag
gerade 0 Volt angezeigt werden. Je nach Kraftmesser ist die Spannung entsprechen
umzurechnen, um die Schleppkraft zu erhalten. Das nachfolgende Diagramm
zeigt eine typische Eichkurve, bei der der Sensor nicht zuvor auf den Nullpunkt
gestellt worden ist. Die Eichung ist für den Krafmesser 5 Newton
durchgeführt. Die blauen Punkte sind die gemessenen Daten. Man erkennt,
dass der Verlauf praktisch linear ist:
 |
2. Sensor für den
Fliehkraftwinkel
 |
 |
| Sensor Fliehkraftwinkel | Position des Sensors |
Der Sensor für den Fliehkraftwinkel
zeigt die Position des äußeren Auslegers an. Die nachfolgende
Grafik zeigt die eingeführte Definition, bei der der Winkel ![]() für die horizontale Lage 0 Grad beträgt und 90 Grad für
die vertikale Position. Leztere ist die Ruheposition.
für die horizontale Lage 0 Grad beträgt und 90 Grad für
die vertikale Position. Leztere ist die Ruheposition.
 |
| Sicherheitshinweis:
Der
Bereich mit Bahngeschwindigkeiten von mehr als
6 m/s ist ausschließlich für
den Laborbetrieb geeignet. Eine kleine Gruppe mit Publikum kann
sich aber stets unterhalb des Inneren Auslegers aufhalten. Dieser Bereich
ist durch die Modellbewegung nicht gefährdet.
Stellen Sie jedoch sicher, dass während des Laborbetriebs der Versuchsraum nicht unkontrolliert betreten werden kann und kein Zuschauer den sicheren Bereich innerhalb des Inneren Auslegers verlässt. |
Im linken, oberen Teil des Diagramms Messung
des Fliehkraftwinkels wird das Ablesen des zugehörigen Winkels
an einem Beispiel demonstriert. Die schwarze Einer-Skala mit den Zahlen
0, 2, 4, 6, 8, 10 (von rechts nach links) gibt an der Schnittstelle mit
der farbigen Zehner-Skala den genauen Winkel an, der zu dem darüber
liegenden Zehnerbereich gehört. Wird der Fliehkraftwinkel kleiner
(höhere Bahngeschwindigkeit), dann bewegt sich die farbige Zehner-Skala
nach unten gegenüber der Einer-Skala.
| Hinweis: Der Gelenkkopf mit der Anzeige des Fliehkraftwinkels kann sehr gut von einer mitbewegten Kamera aufgenommen und angezeigt werden. |
Die kleine Grafik unten links zeigt die
empfohlenen Bezeichnungen an: Innerer Ausleger Ri, Gelenkkopf
Gk, Äußerer Ausleger Ra, Abstand R![]() des Modells m von der Drehachse sowie die drei Kräfte Schwerkraft
FG, Zentrifugalkraft FZ
und Auftriebskraft FA.
des Modells m von der Drehachse sowie die drei Kräfte Schwerkraft
FG, Zentrifugalkraft FZ
und Auftriebskraft FA.
Das rechte Diagramm zeigt den Zusammenhang
zwischen Fliehkraftwinkel und Bahngeschwindigkeit, wenn keine zusätzlich
Auftriebskraft wirkt. Mit Auftrieb kann natürlich der Äußere
Ausleger schon bei mäßigen Geschwindigkeiten eine horizontale
Position einnehmen.
Das nachfolgende Diagramm zeigt eine Eichkurve
für den Fliehkraftwinkel. Die blauen Punkte sind die gemessenen Daten.
Die Kurve ist im gesamten Bereich linear, aber sie trifft im vorliegenden
Beispiel nicht die Skala bei 90 Grad. Der Fehler beträgt ungefähr
4 Grad. Ursache dieses Fehlers ist die Elastizität der Auslegers.
Die Verformung, d.h. die Durchbiegung des Inneren Auslegers, hängt
vom Modellgewicht ab. Jedes Gewicht verlangt prinzipiell eine genaue Überprüfung,
ob der Ausleger genau horizontal ist. Dann ist im Ruhezustand der Winkel
zwischen Innerem und Äußerem Ausleger genau 90 Grad. Dieser
Winkel ist 180°-![]() .
Hängt der Innere Ausleger geringfügig durch, dann ist dieser
komplementäre Winkel 180°-
.
Hängt der Innere Ausleger geringfügig durch, dann ist dieser
komplementäre Winkel 180°-![]() größer
als 90°.
größer
als 90°.
Wird nun der Rundlauf bewegt, so verändert
sich durch die zunnehmende Fliehkraft der Kraftvektor des Äußeren
Auslegers mit dem Modell. Angriffspunkt dieser Kraft ist der Gelenkkopf.
| Hinweis: Es hat sich als zweckmäßig erwiesen, den Fehler durch die Elastizität des Auslegers auf die senkrechte Position zu verschieben. Dann stimmen die Angaben im mittleren Winkelbereich und bei 100% Auftrieb. Mit einigem Aufwand kann man diesen Fehler noch verringerm. |
 |
3. Sensor für den
Drehwinkel
 |
 |
| Position des Drehwinkels | Eichung des Drehwinkels |
Der Sensor ist ein Feldplattenpotentiometer,
das als Inklinometer gebaut ist. Die Ausführung ist besonders leicht
und wiegt nur etwa 3.5 g. Das technische Datenblatt
zeigt, dass der Sensor in der mittlern Ruhelage auch die Hälfte der
angelegten Spannung anzeigt, nämlich 2.5 Volt. Die Veränderung
der Spannung mit dem Winkel laut Datenblatt ist eine erste Näherung,
die mit einer Eichscheibe überprüft
werden sollte. Die nachfolgende Grafik zeigt die Genauigkeit, die sich
an der Flügelspitze erreichen lässt:
{kind=link}
 |
4. Sensor für den
Schlagwinkel
 |
 |
| Position des Schlagwinkels | Eichung des Schlagwinkels |
Der Sensor ist wie der Sensor der Drehbewegung
ein Feldplattenpotentiometer, das als Inklinometer gebaut ist. Die Ausführung
ist besonders leicht und wiegt nur etwa 3.5 g. Das technische Datenblatt
zeigt, dass der Sensor in der mittlern Ruhelage auch die Hälfte der
angelegten Spannung anzeigt, nämlich 2.5 Volt. Die Veränderung
der Spannung mit dem Winkel laut Datenblatt ist eine erste Näherung,
die mit einer Eichscheibe überprüft
werden sollte. Die nachfolgende Grafik zeigt die Genauigkeit, die sich
an der Flügelwurzel erreichen lässt:
 |
Der Vergleich mit der Grafik für den
Drehsensor zeigt auch, dass die relative Empfindlichkeit (Differenz Winkel)/(Differenz
Volt), der Koeffizient a1, bei den beiden Sensoren keinesweg gleich
ist.
Eichen der Sensoren: Die Eichung
der Sensoren geschieht in der Weise, dass die Verdrehung beim Schlag- und
Drehwinkel mit einem längeren Eichzeiger auf einer Eichscheibe
angzeigt wird. Das Zentrum der Winkelskala befindet sich im Drehzentrum
der jeweiligen Bewegung, wie dies auch die voran stehenden Bilder
zeigen. Als Zeiger kann zum Beispiel ein längerer viereckiger Aluminiumstift
dienen, der am Sensor in den kleinen Noppen fixiert wird, die sich auf
Seite mit den Anschlüssen befinden. Die Seite des Zeigers zur Eichscheibe
hin wird als Spitze ausgeformt, so das man den jeweiligen Winkel gut ablesen
kann. Die Eichscheibe muss mit einem weiteren Stativ in der Messposition
gehalten werden.
 |
 |
| Sensor mit Eichzeiger | Noppen für Zeiger |
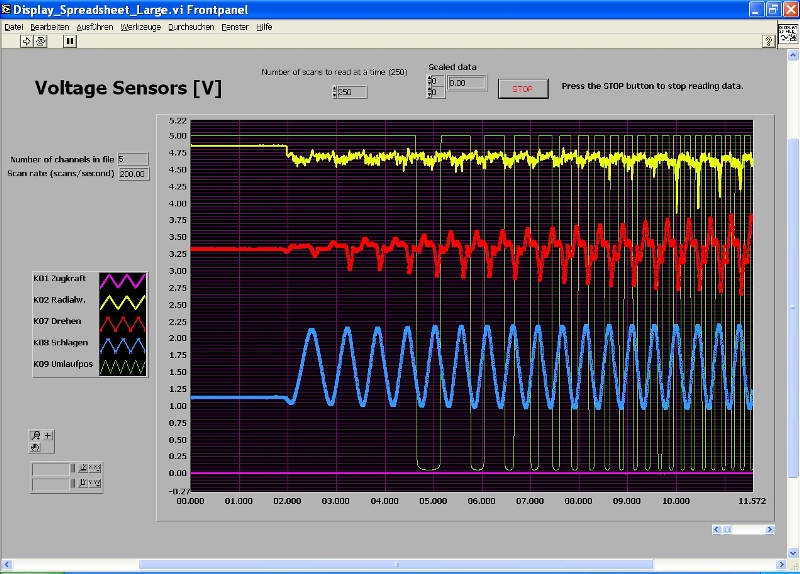
5. Sensor für die Umlaufposition
Der Sensor für die
Umlaufposition ist
oberhalb der Schleifringe an der Zentraleinheit eingebaut. Unter einer
Gabellichtschranke wird eine Strichscheibe mit 180 Strichen bewegt. Die
Strichscheibe ist fest mit dem drehbaren Halter des Ausleger an der
Zentraleinheit
verbunden. Die Signale der Lichtschranke werden noch einmal
verstärkt
und ergeben pro Umlauf eine Impulsfolge von 180 Impulsen. Das
nachfolgende
Beispiel ist mit der Datenerfassung eines PCs aufgenommen worden (DAQ
Card
700 von National Instruments zusammen mit der Software Labview). Die weitere numerische
Auswertung kann mit der Software Microsoft Excel vorgenommen werden. Die Grafik
zeigt die Daten für den Anfahrvorgang des künstlichen Vogels. In den ersten 10 Sekunden sind etwa 26/360 des
Umfangs zurückgelegt worden:
 |
Letzte Änderung: 24. August 2007